
¿Cómo se comporta un grupo de personas al buscar una salida durante una evacuación? ¿Por qué se hace una gran cola cuando un automóvil circula más lento en un carril? ¿De qué forma se van acercando las personas unas a otras durante una reunión? Estas preguntas son frecuentes en la física granular, un área de la Física que estudia el comportamiento de partículas.
Juan Diego Robles es egresado de Física, de la Universidad del Valle de Guatemala (UVG), y actualmente estudia un Máster en Física, en la Universidad de Navarra, España. El licenciado en Física ha realizado experimentos y analizado modelos de física granular. El inconveniente para la investigación era la complicación de apoyarse con personas, animales o automóviles y estudiarlos en espacios acordes, solicitar permisos y adecuar protocolos. Para solventar la situación se realizan experimentos con robots diseñados para este tipo de investigación.

Robotat del CIT
Para realizar su investigación, Juan Diego solicitó el apoyo de M.Sc. Miguel Zea y el Dr. Luis Alberto Rivera, investigadores del Depto. de Ingeniería Electrónica, Mecatrónica y Biomédica. Ellos le dieron acceso al Robotat, espacio maker ubicado en el CIT-116. Este cuenta con un robotario único en Latinoamérica con cámaras especializadas y 25 metros cuadrados (5×5 metros).
Gracias a este “hábitat para robots”, Juan Diego logró levantar un modelo fundamental de física de partículas, como lo es el tráfico vehicular en una línea. Su investigación demuestra las “colas fantasma”. Una cola fantasma se refiere al momento en que varios vehículos se encuentran en una misma fila y el primero se distrae o maneja a una velocidad más lenta que los demás. A pesar que no hay ningún accidente, se forma un atrancamiento.
Con la plataforma y el sistema de captura de movimiento es posible validar la data y compararla con el modelo teórico. De esa forma, se verifica si se está cumpliendo el comportamiento de la física de partículas con estas variables.
Apoyo estudiantil
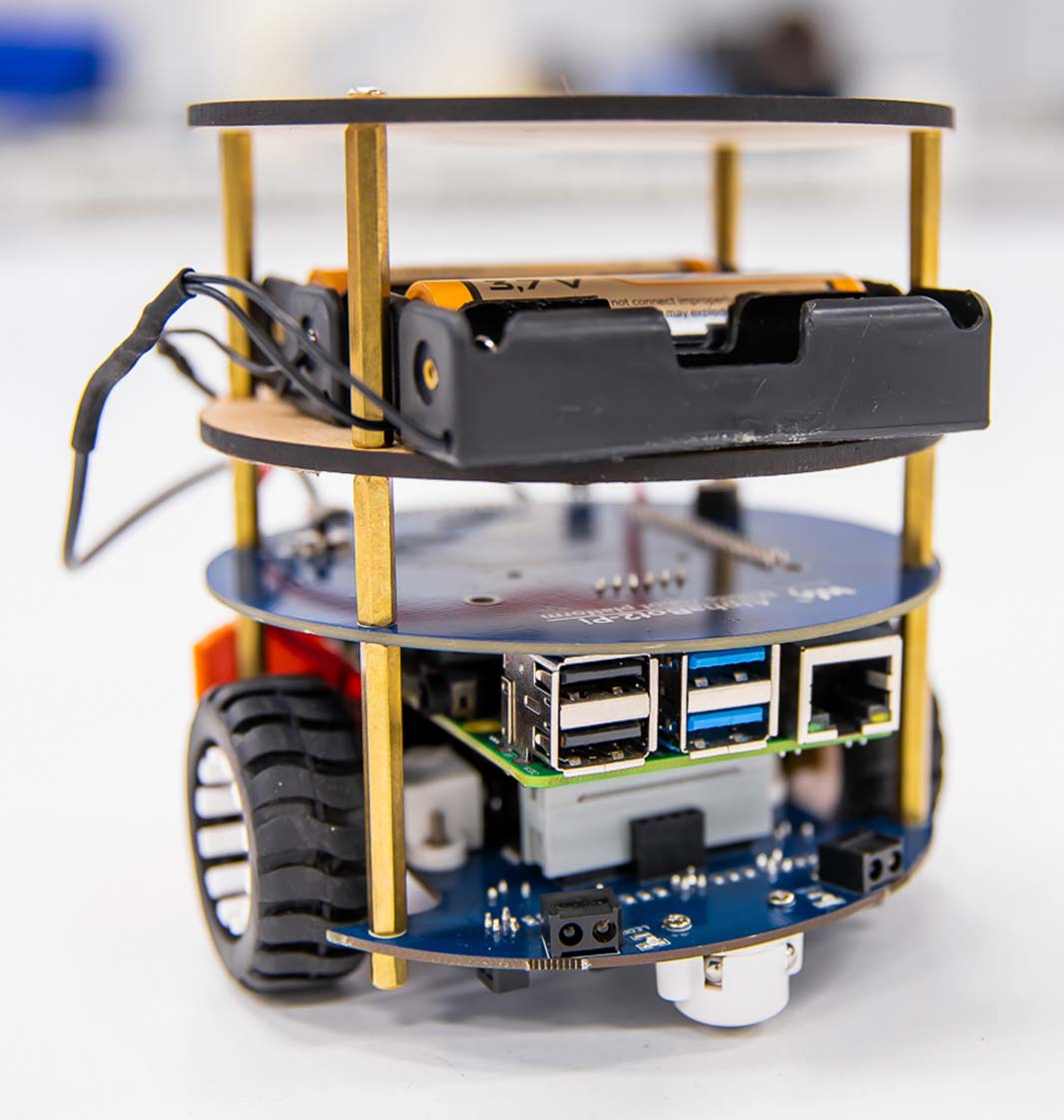
Juan Diego Robles contó con el apoyo de Luis Nij, estudiante de último año de Ingeniería Electrónica. El Dr. Luis Alberto Rivera, catedrático e investigador del Centro de Procesos Industriales, comenta que gracias a cursos sobre programación, microcontroladores, sistemas embebidos, sistemas de control y robótica, los estudiantes pueden conocer sobre plataformas como la Raspberry Pi y otras.
El doctor explica que también estudian elementos móviles para validar modelos físicos. En los últimos años han trabajado en el tema de Robótica de Enjambre o Robótica Swarm. Esta área analiza comportamientos observados en la naturaleza que puedan ser replicados por robots.
Por ejemplo, observar cómo se comporta una colonia de hormigas, un banco de peces o una bandada de aves, es importante para saber cómo colaboran entre ellos para realizar tareas que no las realizan de forma individual. Este tipo de organización puede ser emulada por robots. En ambientes como el Robotat se validan algoritmos y modelos con variables controladas.

Para Juan Diego, UVG es pionera en Guatemala por validar modelos teóricos de física granular que ya existen con robots; más aún en un robotario. Si te llama la atención la Ingeniería Electrónica, Mecatrónica y Biomédica, conoce más aquí.

También te puede interesar
Descubre los laboratorios de Ing. Electrónica, Mecatrónica y Biomédica
En UVG desarrollamos una máquina de ventilación automática
Carlos Esquit, el ingeniero que pasó de un sueño personal a un logro colectivo

